BOM
BOM Cart
Cart Product Catalog
Product CatalogThe TJA1050 is one of the most widely used high-speed CAN transceivers in embedded systems, automotive electronics, and industrial automation. In this comprehensive guide, we’ll explore its overview, pinout, features, specifications, applications, and comparisons—along with practical insights for real-world use.
2. TJA1050 Pinout and CAD Design
3. Key Features of TJA1050 Can Transceiver
6. MCP2515 CAN Bus Module with TJA1050
8. Frequently Asked Questions [FAQ]
TJA1050 Overview
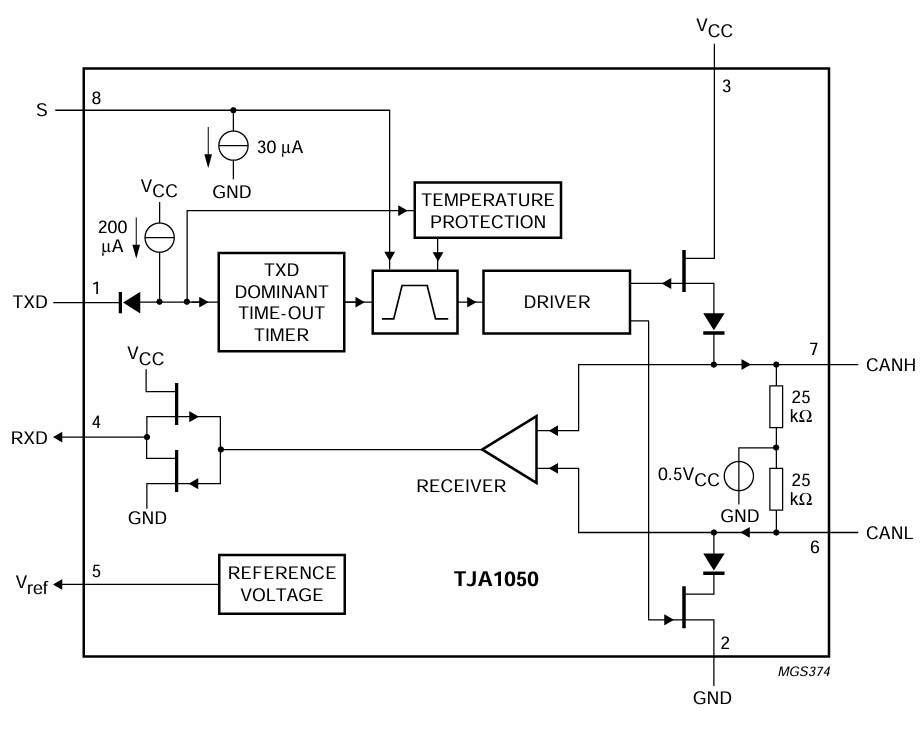
The TJA 1050 from NXP Semiconductors is a high-speed CAN transceiver that serves as the interface between a Controller Area Network (CAN) protocol controller and the physical CAN bus. It enables reliable communication by converting logic-level signals into differential signals for transmission, and vice versa.
This device provides differential transmit capability to the bus and differential receive capability to the CAN controller, ensuring stable data exchange even in electrically noisy environments. The use of differential signaling through CANH and CANL significantly improves noise immunity and signal integrity, which is especially important in automotive and industrial applications.
The chip is the third-generation high-speed CAN transceiver developed after the earlier Philips models PCA82C250 and PCA82C251. Compared to these previous versions, the TJA 1050 offers much lower electromagnetic emission because optimized matching of the CANH and CANL output signals, improved behavior in situations where a node is unpowered so that it does not disturb the bus, and the absence of a standby mode. This design choice makes it particularly suitable for nodes operating in power-down conditions within partially powered CAN networks.
Overall, the component provides a reliable and efficient solution for high-speed CAN communication, especially in systems where require robustness, low noise emission, and stable operation under varying power conditions.
TJA1050 Pinout and CAD Design
Pin Configuration
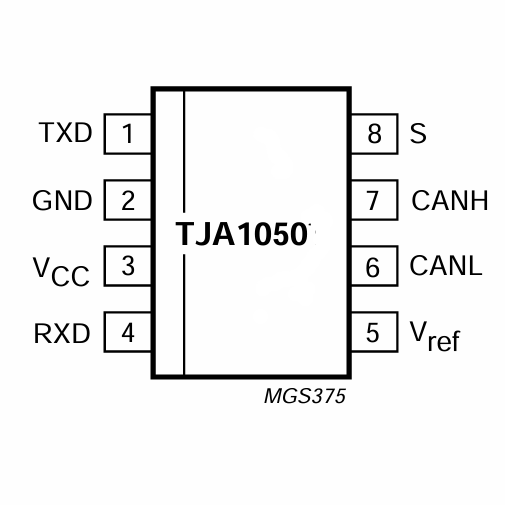
Symbol | Pin | Description |
TXD | 1 | Transmit data input; reads in data from the CAN controller to the bus line drivers |
GND | 2 | Ground |
VCC | 3 | Supply voltage |
RXD | 4 | Receive data output; reads out data from the bus lines to the CAN controller |
Vref | 5 | Reference voltage output |
CANL | 6 | Low-level CAN bus line |
CANH | 7 | High-level CAN bus line |
S | 8 | Select input for high-speed mode or silent mode |
Functional Overview
TXD converts digital signals into differential CAN signals
RXD outputs decoded bus data
CANH/CANL form a balanced differential pair
Silent mode disables transmission (useful for monitoring)
CAD Design
Symbol
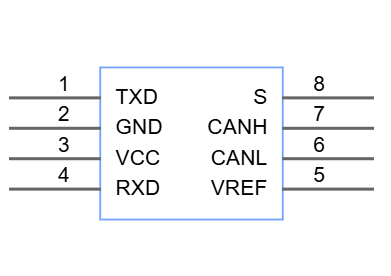
Footprint

TJA1050 Functional Block Diagram
Key Features of TJA1050 Can Transceiver
ISO 11898 Compatibility
The circuirt is fully compliant with the ISO 11898 standard for high-speed CAN communication, ensuring interoperability with standard CAN controllers and networks.
High-Speed Communication
It supports data transmission rates of up to 1 Mbaud, making it suitable for real-time applications in automotive and industrial systems.
Low Electromagnetic Emission (EME)
Optimized output signal matching between CANH and CANL significantly reduces electromagnetic emissions, improving overall system performance.
High Electromagnetic Immunity (EMI)
The differential receiver features a wide common-mode range, allowing the device to operate reliably in noisy electrical environments.
Unpowered Node Protection
The transceiver ensures that an unpowered node does not interfere with the CAN bus, maintaining network stability even when some nodes power down.
TXD Dominant Time-Out Function
A built-in TXD dominant time-out function prevents the bus from being blocked because a stuck dominant signal, enhancing system safety.
Silent Mode Operation
The silent mode disables the transmitter while keeping the receiver active, allowing the node to monitor bus traffic without affecting communication.
Automotive Transient Protection
Protect bus pins against voltage transients commonly found in automotive environments, improving durability and reliability.
Logic Level Compatibility
Input levels are compatible with both 3.3V and 5V devices, providing flexibility when interfacing with different microcontrollers.
Thermal Protection
The device includes thermal shutdown protection to prevent damage from overheating during operation.
Short-Circuit Protection
It is protected against short circuits to both battery and ground, ensuring safe operation under fault conditions.
High Node Capacity
The chip supports connection of at least 110 nodes on a single CAN network, making it suitable for large distributed systems.
TJA1050 Applications
The TJA1050 widely use in systems that require reliable and high-speed CAN communication, especially where strong noise immunity and stable long-distance data transmission are important.
Automotive Electronics
It plays a key role in modern vehicles by enabling communication between multiple Electronic Control Units (ECUs), such as engine management, transmission systems, airbag modules, and braking systems. Its robustness makes it suitable for harsh automotive environments with high electrical noise.
Industrial Automation
In industrial control systems, the TJA 1050 use for connecting programmable logic controllers (PLCs), sensors, and actuators. It ensures accurate and synchronized data exchange across factory networks, even over long cable distances.
Motor Control and Robotics
Commonly use the device in motor drivers, servo systems, and robotic platforms where precise and real-time communication is required. CAN networks help coordinate multiple motors and control units efficiently.
Building and HVAC Systems
In smart buildings, the transceiver chip supports communication between controllers managing heating, ventilation, air conditioning, and lighting systems. It helps improve energy efficiency and centralized control.
Telecom and Base Stations
It is used in telecom equipment and base stations for system monitoring, diagnostics, and control signaling, where reliable communication is critical for continuous operation.
Medical Equipment
Also can find the citcuit in certain medical devices that require stable internal communication between modules, benefiting from CAN’s reliability and error-checking features.
CAN-Based Protocol Systems
The transceiver supports higher-layer CAN protocols such as CANopen, DeviceNet, and CAN Kingdom. These protocols widely use in embedded systems, allowing designers to build scalable and interoperable communication networks.
TJA1050 Specifications
Table
Parameter | Value |
Device Type | CAN Transceiver |
Protocol | CAN (ISO 11898) |
Data Rate | Up to 1 Mbps |
Supply Voltage (VCC) | 4.75V – 5.25V |
Logic Input Levels | Compatible with 3.3V and 5V |
Bus Interface | Differential (CANH, CANL) |
Operating Modes | High-Speed Mode, Silent Mode |
Receiver Hysteresis | 70 mV |
Number of Drivers/Receivers | 1/1 |
Duplex Mode | Half Duplex |
ESD / Transient Protection | Automotive-level protection |
Short-Circuit Protection | To battery and ground |
Thermal Protection | Yes |
Maximum Nodes Supported | ≥110 |
Package | SOIC-8 |
Mounting Type | Surface Mount |
Operating Temperature Range | -40°C to +85°C |
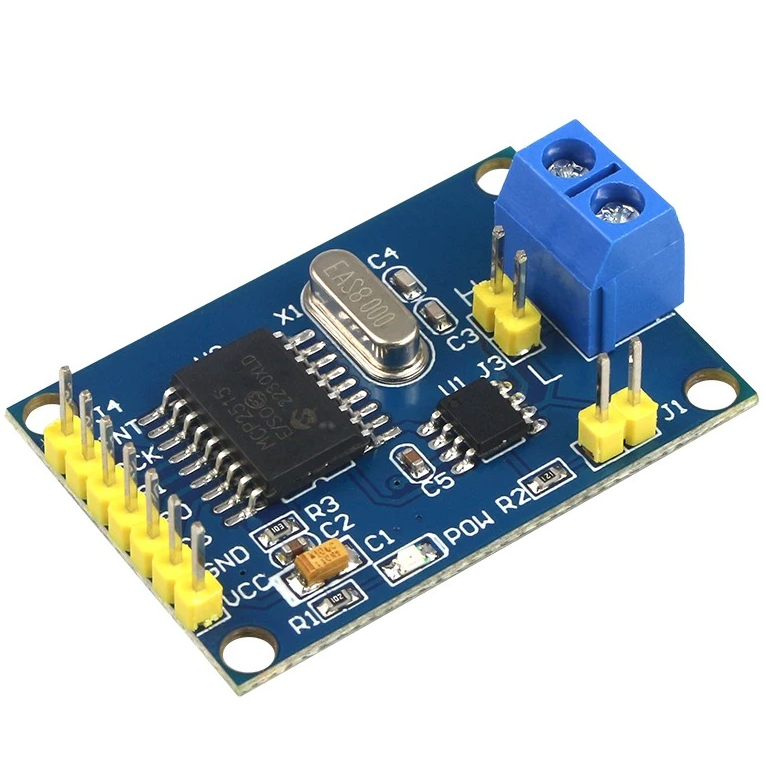
MCP2515 CAN Bus Module with TJA1050
The MCP2515 CAN Bus module with TJA1050 combines a CAN-controller and a CAN-transceiver to provide a complete CAN-communication solution for microcontrollers such as Arduino and Raspberry Pi. The MCP2515 handles the CAN protocol via SPI, while the TJA1050 manages the physical layer interface to the CAN bus.
Module Features
CAN V2.0B Support
The module fully supports the CAN V2.0B specification, allowing reliable communication in standard CAN networks with high compatibility.
High Communication Speed
It supports data transmission rates of up to 1 Mb/s, making it suitable for real-time control and monitoring applications.
Flexible Data Length
The module supports data frames with lengths ranging from 0 to 8 bytes, which is standard for CAN communication.
Multiple Frame Types
It supports standard frames, extended frames, and remote frames, providing flexibility for different CAN protocols and applications.
SPI Interface Control
The MCP2515 communicates with the host microcontroller via an SPI interface, making it easy to integrate with various embedded platforms.
5V Power Supply
The module operates on a 5V DC power supply, ensuring compatibility with most development boards and embedded systems.
120Ω Termination Resistor
A built-in 120Ω resistor ensures proper impedance matching on the CAN bus, improving signal integrity and enabling reliable long-distance communication while reducing signal reflections.
Low Power Consumption
The module typically consumes around 5mA during operation, with a standby current as low as 1µA (excluding the power indicator LED), making it efficient for low-power designs.
Industrial Temperature Range
Design to operate within a temperature range of -40°C to +85°C, making it suitable for industrial and automotive environments.
Overall, this module provides a convenient and cost-effective way to add CAN bus capability to embedded systems using the TJA1050 transceiver.
SN65HVD230 vs TJA1050
Compare Table
Parameter | SN65HVD230 | TJA1050 |
Device Type | Transceiver | Transceiver |
Protocol | CANbus | CANbus |
Drivers/Receivers | 1/1 | 1/1 |
Duplex | Half | Half |
Receiver Hysteresis | 100 mV | 70 mV |
Data Rate | 1 Mbps | Up to 1 Mbps |
Supply Voltage | 3V ~ 3.6V | 4.75V ~ 5.25V |
Operating Temperature | -40°C ~ 85°C | Typically industrial grade |
Mounting Type | Surface Mount | Surface Mount |
Package | SOIC-8 (3.90mm width) | SOIC-8 (3.90mm width) |
Key Differences
Supply Voltage
The SN65HVD230 operates at 3.3V, making it ideal for low-power microcontrollers and modern embedded systems. In contrast, the TJA1050 requires a 5V supply, which is more common in automotive and industrial environments.
Receiver Sensitivity
The SN65HVD230 has higher receiver hysteresis (100 mV), offering stronger noise immunity, while the TJA 1050 (70 mV) provides stable and reliable signal detection in typical CAN applications.
Application Focus
The SN65HVD230 widely use in low-voltage embedded systems such as IoT devices and microcontroller-based designs. The TJA 1050 is more suited for automotive and industrial systems where require 5V power and higher robustness.
Typical Applications
Both transceivers are used across a wide range of CAN-based systems, including industrial automation, control systems, sensor networks, and drive systems. Also commonly find in motor control and robotics, building and HVAC control systems, telecom infrastructure, and base station monitoring. In addition, they support CAN-based higher-layer protocols such as CANopen, DeviceNet, and CAN Kingdom, enabling flexible and scalable communication in embedded networks.
TJA1050 Datasheet PDF
The TJA1050 from NXP Semiconductors is a high-speed CAN transceiver designed for reliable communication in automotive and industrial CAN networks.
For complete electrical characteristics, timing diagrams, and application guidelines, refer to the official data sheet provided by NXP.
Frequently Asked Questions [FAQ]
What is the difference between TJA1050 and MCP2551?
TJA1050 has better electromagnetic emission performance and improved behavior in unpowered nodes, while MCP2551 is an older CAN transceiver. Both support high-speed CAN, but TJA 1050 offers more modern automotive-grade improvements and stronger noise optimization.
What are the typical CAN voltage levels?
In a dominant state, CANH is about 3.5V and CANL about 1.5V. In recessive state, both lines stay near 2.5V. The differential voltage determines logic states, ensuring noise-resistant communication across the CAN bus.
Under what conditions does the TJA1050 operate?
TJA1050 operates with a 5V supply, typically from 4.75V to 5.25V. It works in automotive and industrial environments, supporting high noise immunity, temperature variations, and stable operation in partially powered CAN networks without disturbing the bus.
Can a Raspberry Pi communicate with a CAN bus?
Yes, a Raspberry Pi can communicate with CAN bus using an external CAN controller like MCP2515 and a transceiver such as TJA1050. SPI interface connects MCP2515, enabling full CAN communication support through Linux CAN drivers.
What is the difference between TJA1040 and TJA1050?
TJA1040 includes standby and low-power modes, making it more power-efficient. TJA1050 removes standby mode but improves electromagnetic performance and robustness in partially powered networks, making it simpler and more stable for certain automotive applications.
What voltage is TJA1050 logic?
TJA1050 uses a 5V supply voltage, typically between 4.75V and 5.25V. Its logic interface is compatible with both 3.3V and 5V microcontrollers, allowing flexible integration in embedded systems and automotive CAN networks.
What is the purpose of a CAN transceiver?
A CAN transceiver converts digital signals from a CAN controller into differential signals for the CAN bus and vice versa. It ensures reliable long-distance communication with high noise immunity in automotive and industrial environments.
What is the baud rate of TJA1050?
The TJA1050 supports high-speed CAN communication up to 1 Mbps (1 Mbaud). This makes it suitable for real-time control systems, automotive networks, and industrial automation applications requiring fast and reliable data exchange.
Conclusion
The TJA1050 CAN transceiver remains a reliable and widely used component for high-speed CAN communication. Its strong EMI performance, robustness in unpowered conditions, and compatibility with industrial environments make it a solid choice for automotive and embedded systems.
When paired with controllers like MCP2515, it becomes an easy-to-use solution for implementing CAN networks in modern electronics projects.
Read More:
1. BPW34 Photodiode: Datasheet, Pinout, and Alternative
2. TB6612 IC and Arduino TB6612FNG Motor Driver Module Guide
HOT NEWS
Understanding A 0603 Resistor
0603 resistor,dimensions,marking code, values
2025-05-29
The 0402 Resistor: A Comprehensive Guide

0402 Resistor
2025-05-06
LR41 Battery Guide: Specifications, Equivalents, and Uses

LR41 Battery Specifications, Equivalents, and Uses
2025-12-14
MT3608 Boost Converter - An In-Depth Guide
MT3608 Boost Converter
2025-09-04
What Is A 1206 Resistor?
1206 resistor dimensions,footprint,value
2025-06-05
TP4056 Charging Module Pinout, Working, and Applications

TP4056 Charging Module Pinout, Working, and Applications
2026-01-23
Everything You Need To Know About ARE1309 Relay

2025-04-23
Complete Guide to the 220 Ohm Resistor
220 Ohm Resistor
2025-07-28
120 Ohm Resistor- Specifications, Applications, and Features
2025-05-12
Guide To The AMS1117 Voltage Regulator

AMS1117 Voltage Regulator Circuit
2025-08-17